Leider tritt das Phänomen des sog. „Yaw Drift“ – also die ungewollte Drehung auf Vertikal- oder Gierachse – bei dem ein oder anderen Modell auf. Die Ursachen hierfür können ganz vielfältig sein. Wenn man sich sicher, dass das Modell exakt symmetrisch aufgebaut ist und alle Abstände identisch sind, der Quadcopter aber weiterhin ungewollt driftet, lohnt sich ein Blick in die Konfigurationssoftware des CC3D. Ob LibrePilot oder OpenPilot ist völlig egal. Die Einstellung gibt es bei beiden an der gleichen Stelle.
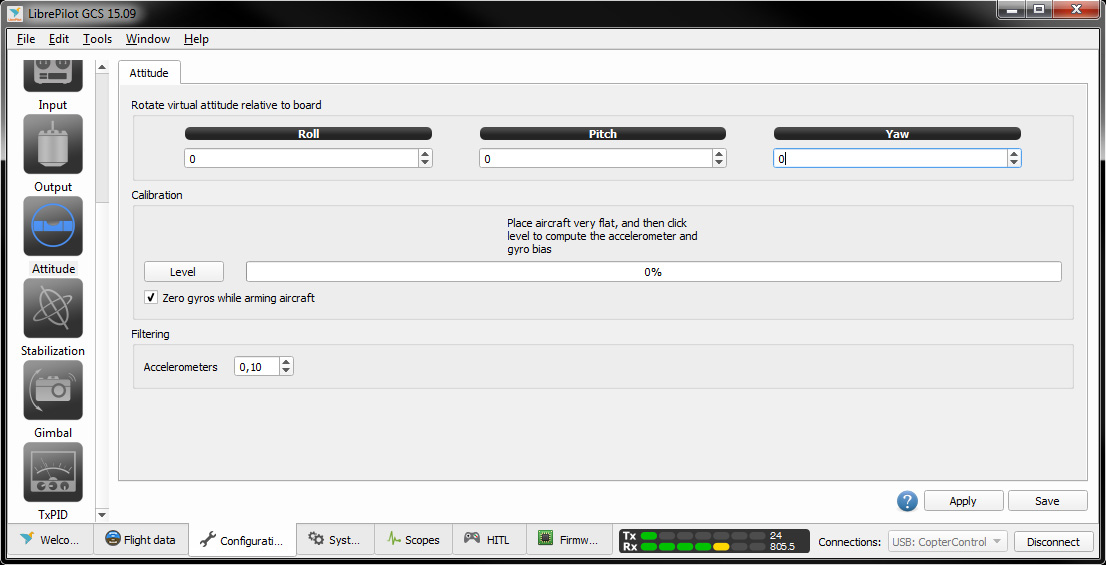
Es geht um die sog. „Pirouette Compensation“. Diese war in meinem Fall eingeschaltet. Zu finden ist die Checkbox unter „Configuration –> Stabilization –> Advanced Tab“. Normalerweise ist sie eingeschaltet. Im LibrePilot Wiki findet man weitere Erläuterungen, wofür die Pirouette Compensation nützlich ist. Seitdem ich die Checkbox deaktiviert habe, dreht sich mein ZMR 200 endlich nicht mehr nach links!